NEWS
State Farm funds student innovation, dreams at Florida International University Discovery Lab
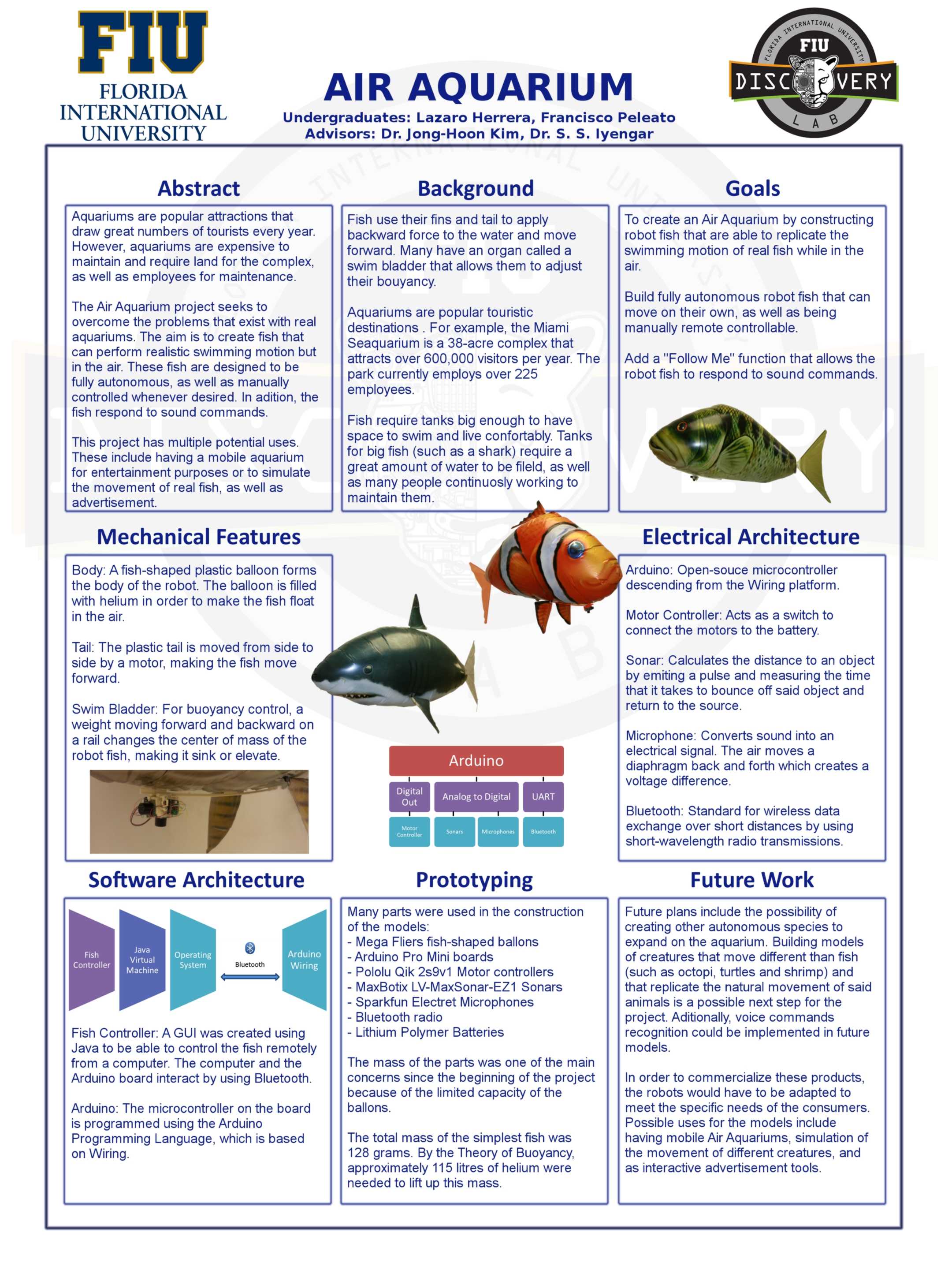
State Farm funds student innovation, dreams at Florida International University Discovery Lab Lazaro Herrera has been obsessed with robots since junior high. Lazaro Herrera A native of Santa Clara, Cuba who came to the United States when he was…..

iRobot and Willow Garage Debate Closed vs. Open Source Robotics at Cocktail Party
iRobot and Willow Garage Debate Closed vs. Open Source Robotics at Cocktail Party POSTED BY: FRANK TOBE / THU, MARCH 22, 2012 In this post, Frank Tobe, a robotics analyst and publisher of The Robot Report, describes a recent debate between two…..
Gumby-like flexible robot crawls in tight spaces
Gumby-like flexible robot crawls in tight spaces This undated photo provided by Harvard University/Robert Shepherd shows a soft-bodied robot navigating, top to bottom, an obstacle course. Harvard researchers have built this flexible prototype robot that can crawl and move in…..
First Winner of Programming Contest (Leo Shao – undergaduate student in Discovery Lab)
Programming Contest Top 3 The SCIS Programming Team and the ACM Club held a programming competition last Saturday, Feb 4, and we are happy to announce the winners: 1. Leo Shao ¥éË (Undergaduate student in Discovery Lab) 2. Jorge…..